Wolfpack – マップを使用してコンボイのコースと速度を見つける方法

車列の距離と速度を見つけるのは難しい場合があります。特に、マストの実際の高さを確認するのが難しい夜間では、注意が必要です。しかし、船団の実際の進路、速度、距離を知るために必要なのは、ある程度の時間と正確な測定と地図だけです。
このメソッドが依存するもの
基本的に必要なのは、正確な瞬間にコンボイへの正確な方位を示すことだけです。トリッキーな部分は、何のためにベアリングを取るべきかを知ることです.まず、それは常に同じ船であり、常に船の同じ部分であるべきです。じょうごを狙うことは非常に賢明であることが証明されています。これは、煙のために遠距離でもよく識別できる部分だからです。常に同じ船である必要があります。さもないと、間違ったデータが得られます。
もちろん、この方法は、おびえておらず、一定の速度で一定の方向に移動している船団にも依存します。
準備
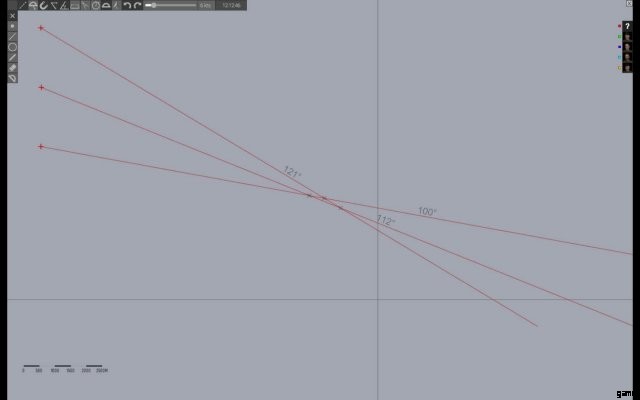
分度器を回して、その 0 が現在の見出しと一致するようにします。これは重要です。指揮官は目標の方向ではなく方角のみを与えることができるため、彼から得られる情報は自分の船に関連するものになるからです。言い換えれば、あなたが 180 度を向いていて、彼が 340 度の方位にターゲットを見つけた場合、それはターゲットが潜水艦に対して 160 度のヘディングにあることを意味します。分度器が正しく設定されている場合 (つまり、潜水艦が向かっている方向を指している場合)、司令官から得られる方位は分度器の方位に対応します。それらを使って線を引きます。
また、今度はベアリングを取る間隔を決定する必要があります。間隔が長ければ長いほど、作業にかかる時間が長くなり、(おそらく) より正確になりますが、船団の速度、範囲、方向を見つけるまでにかかる時間も長くなります。これらのことを判断するには、少なくとも 4 つの方向 (実際には通常は 6 ~ 7 に近い) が必要です。そのため、基本的に 7 分の間隔を使用すると、コースを見つけるのに 30 分かかることになります。
最初の試行では、すべての計算を行うのに十分な時間を確保するために、7 分または 10 分で実行することをお勧めします.自分のやっていることに確信があれば、時間を短くすることもできますが、4 分未満にしないことをお勧めします。4 分未満にすると、結果は非常に悪くなります。
第 1 および第 2 方位
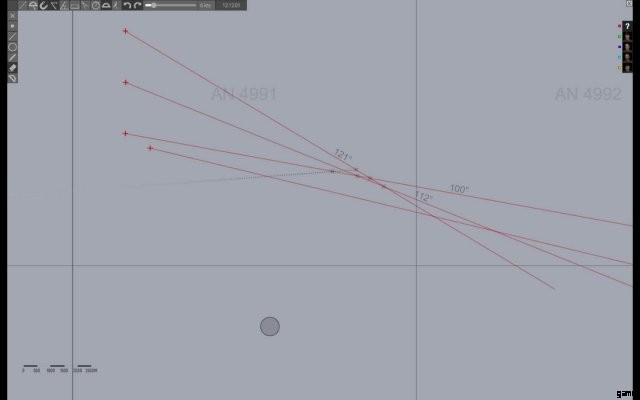
司令官が護送船団を発見したら、開始です。彼に方角を尋ね、地図上に時限点を置いて、いつそれを取得したかがわかるようにします(このデモンストレーションでは、申し訳ありませんが、私は怠け者で、取得するのに25分待ちたくありませんでした.スクリーンショットですが、これは私が「実際の」設定で間違いなく行うことです)。
あなたが作った点から、あなたの司令官があなたに言った方向に線を引きます(彼はあなたに方位を与えたことに注意してください、分度器からの情報を使って線を引きます!).次に、決めた時間だけ待ちます。

コースの変更がある場合は、新しいコースを反映するように分度器を調整してください。
時間が経過したら、現在の位置に新しい時限ドットを置き、新しい方位を求めます。もう一度、司令官から指示された方向に線を引いてください。

3 番目のベアリング
決定した時間までもう一度待って、プロセスを繰り返します。まだコースを変更していない場合は、今回のみコースを変更する必要があります。この 3 番目の方位により、コースを変更しなければ、次の方位をどこで取得するかを予測するためのすべてが得られるからです。コースと速度を変更することをお勧めします。通常、指揮官はこれを使用して護送船団に向きを変え、速度を落として自分で速度を推定し、自分の推定値と私の計算を比較しますが、コースを変更する限り、何でも構いません.
以前にコースを変更しても、目撃情報が無効になることはありません (通常、コースの変更が多いほど良い)。
そこで、私たちはこの方位を取り、進路を変更します.
描いた 3 本の線が三角形を形成していることに気付くでしょう。各コーナーにマーカーを置きます。
4 番目の方位の予測
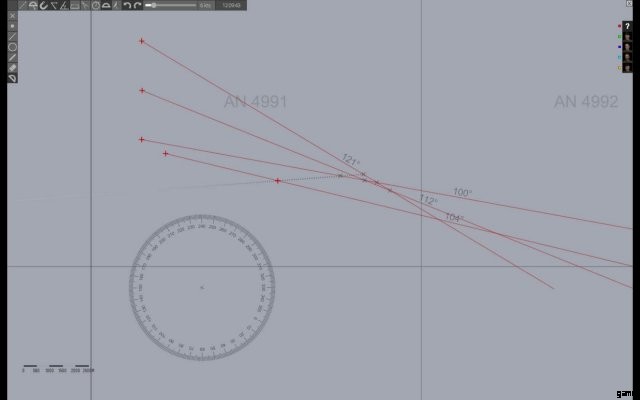
さあ、ごっこ遊びをしましょう。車列が実際に最初の方位に沿って移動していると想像してみましょう。 2 回目は 1 番目と 2 番目の方位が交差し、3 回目は 1 番目と 3 番目の方位が交差するのを見た場合、その可能性は十分にあります。では、その護送船団が最初の目撃情報に沿って移動していたとしたら、4 回目の目撃情報はどこにあるのでしょうか?ここで、船団が一定の方向と速度で移動していることがわかっているので、最初の方位が示した線に沿ってさらに移動し、2 回目と 3 回目の目撃の間と同じ距離を再び移動します。
そこで、2 番目と 3 番目の方位が最初の方位と交差する点の距離を測定し、3 番目の方位が交差する場所から最初の方位に沿って移動します。
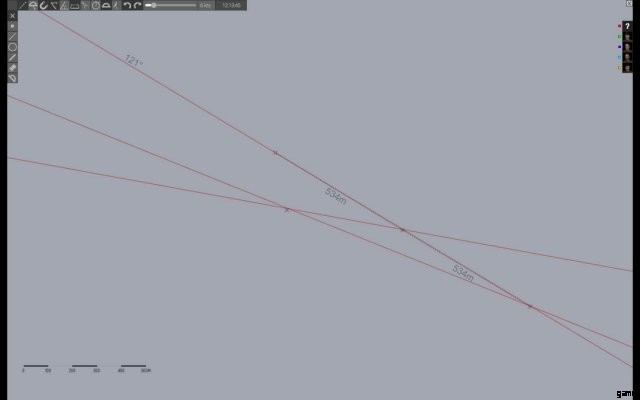
この画像では、一番上の行が最初の目撃情報です。右下隅の交差点は、2 番目の目撃情報が交差する場所です。
これは、4 回目の (仮説上の) 目撃情報をプロットする最初のポイントです。
ここで、3 回目の目撃が車列の進路であったと想像してみましょう。最初のベアリングが交差する場所を初めて見たでしょう。 2 番目のベアリングが交差する場所を 2 回目に見たはずです。 3 回目は、3 回目の目撃情報に沿ってさらに下に同じ距離を見たはずです。そして 4 回目は、3 回目の目撃情報から離れた場所で、さらに別の時間にそれを見ることになります。
言い換えると、1 番目と 2 番目の方位が 3 番目の方位と交差する距離を測定し、その値を 2 倍にして、3 番目の観測に沿ってさらに下に移動します。
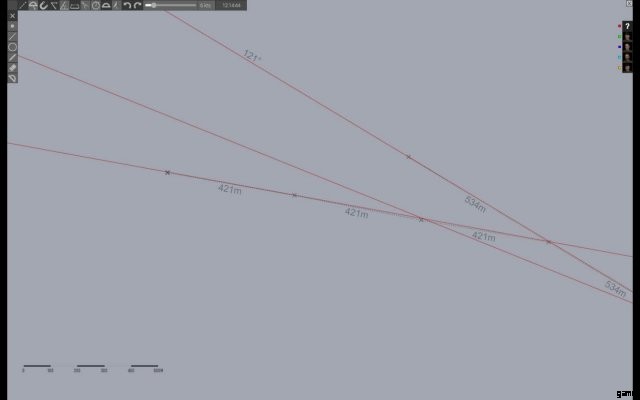
これで、プロットする 2 つの点ができました。これらの 2 点間の角度を測定します
その角度で 2 点を通り、現在の位置に向かって線を引きます。

方向を変えなければ、船団はこのように見えます。これが、3 回目の目撃後までにコースを変更しなければならない理由です。
4 番目の方位と目標距離
さらにもう 1 期間待った後、予測した方向と交差する方向が得られることを願っています。
4 番目の方位が私たちの建造物と交差する点が、私たちが目指している船の現在位置です。言い換えれば、車列までの距離がわかったので、方位が取られた地点から交点までの距離を測定するだけです。
距離からコースへ
距離がわかったので、コースを見つけることができます。私たちが知っていることは、護送船団は一定の速度と方向で移動するということです。つまり、護送船団のコースが目撃情報と交差するポイントは、互いに同じ距離にある必要があります.
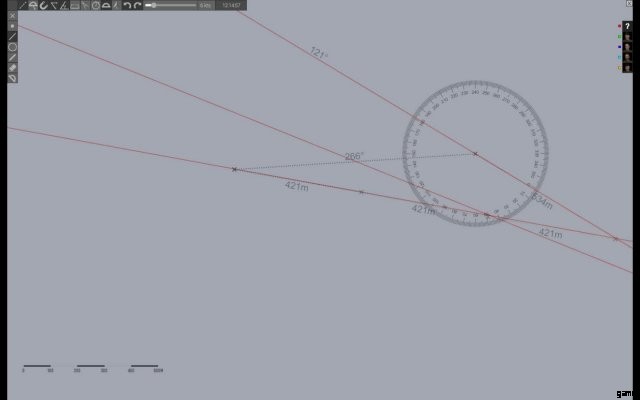
これらのポイントを見つけるのはかなり簡単です。決定したばかりの位置を通る 3 番目のベアリング上のある点を中心に円を描きます。 3 番目の方位のどこに描画しても問題ありませんが、一般的には、その位置に対してかなり垂直に配置することをお勧めします。

目標位置と円の中心に接する円を通る線を引き、円の正確な反対側を見つけます。 x でマークしてください。

2 番目の方位と交差する 3 番目の方位と平行に走る新しい点を通る線を引きます (つまり、3 番目の方位がどの角度であったかを見て、同じ角度で線を引きます)。
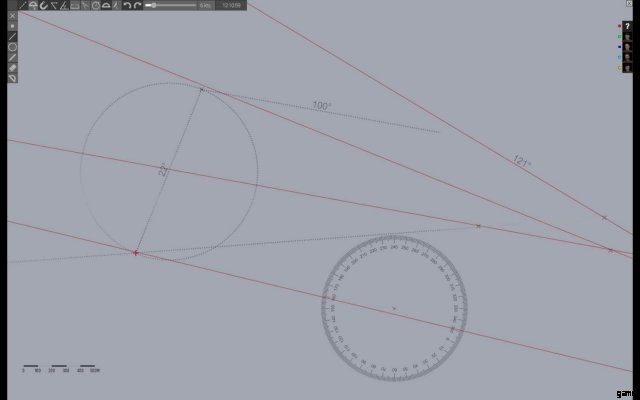
この点からターゲットの位置まで線を引きます。これで、目的の船団の進路がわかりました。

コースからスピードへ
速度を計算することはかなり簡単です。 Q を押すと、速度ではなく移動に必要な時間が表示されます。次に、車列のコースに沿って 2 つの方位間の距離を測定します (精度を高めるために、できる限り離れて測定することをお勧めします)。画面の上部にある速度スライダーを調整して、測定した時間が方位間の時間と一致し、コンボイの速度が得られるようにします。
ここまでの理論は…
実際には、それがうまくいかない場合がたくさんあります。方位が互いに平行で、交差しない場合があります (交差するものが得られるまで待たなければならないため、これは起こりうる最悪の事態です)。それらが発散する (つまり、角度が大きくなる) 場合は、サブの反対側まで線を引き続け、そこに三角形を描くだけで、同様に機能します。線が実際に 1 点で交差している場合は、船団と同じ方向を向いている可能性が高くなります。
1 つの角度が 140 度を超え、他の 2 つの角度がほとんど存在しない非常に不均一な三角形も、正確な測定にはあまり役に立ちません。もちろん、コース変更の量は、4 番目の方位が実際に適切な交差点を提供するかどうかに大きな役割を果たします。この交差点は、上下 1 度で 1000 メートルの違いを意味するほど浅い角度ではありません。
結局、多くの場合、測定に 30 分以上かかります。その場合、他のすべてのベアリングを使用して三角形を作成し、間隔時間を増やして精度を上げることが可能になり、非常に便利になります.