ブリック リグ – ピストン サスペンション ガイド (作り方)

これは、1 つに結合された 2 つのガイドです。 2種類のサスペンション。おそらくよく知っているものと、おそらく知らないものです。どちらも効果的です。写真だけで両方のサスペンションをすでにうまく組み立てています.
免責事項: このガイドでは、サスペンションの構築をできるだけ簡単にします。それは機能し、あなたが行う可能性のある将来の一時停止の基礎またはアイデアを提供することを意図しています.見栄えを良くするためのものではありません。
逆ピストンサスペンションガイド

これは、ワークショップではおそらく非常にまれなタイプのサスペンションです。
4面すべての個々のサスペンションはまったく同じです。サスペンションをコピー アンド ペーストおよび/またはミラーリングするだけで、すばやく構築を完了できます。
追加情報:
すべてのピストンの設定:
- スプリング剛性:0.01
- アクチュエータ モード:春
他のすべてのアクチュエーターは次のように設定されています:
- アクチュエータ モード:物理駆動
車軸:
- サスペンション剛性:100
- サスペンション トラベル:0
- 回転半径:30
- ベースを作る
ベースを作る

5×6 スケーラブル ブリック 1 から始めます。運転席とエンジンを追加します。

1×6 スケーラブル キューブと 1×1 スケーラブル キューブを追加します。

1×4 スケーラブル ブリック 1 を追加します。
これで車両のベースが完成しました。
サスペンションの作成

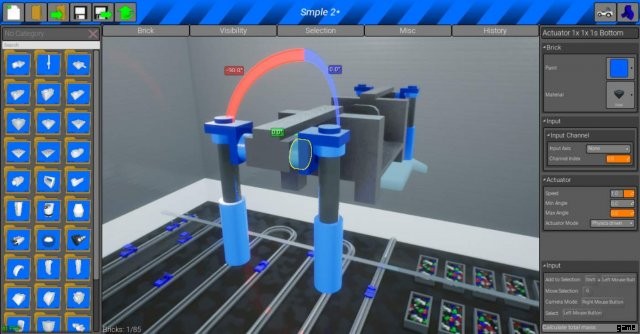
ピストンを追加します。 Actuator Mode ですべて「Spring」に設定します。スプリングの剛性を 0.01 に設定します。次に、2×1 スケーラブル ブリック 1 を追加します。

アクチュエータトップを追加します。

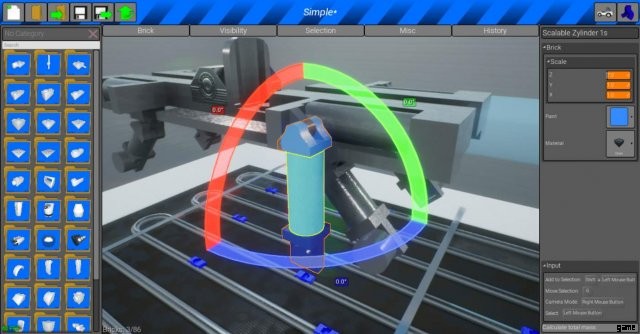
アクチュエータ下部を追加します。アクチュエータを「Physics Driven」に設定します。次に、1×4 Scalable Zylinder 1s を追加します。次に、リダイレクター 4sx 1×1 を追加します。すべてが 45 度の角度に設定されています。

「Physics Driven」に設定された回転アクチュエータを追加します。スケーラブルな zylinder 1s を追加します。

次に横に、「Physics Driven」に設定されたアクチュエータトップを追加します。次に、1×7 スケーラブル Zylinder 1 を追加します。次に、リダイレクタ 4sx 1×1 を追加します。
アクチュエータの上部に接続します。

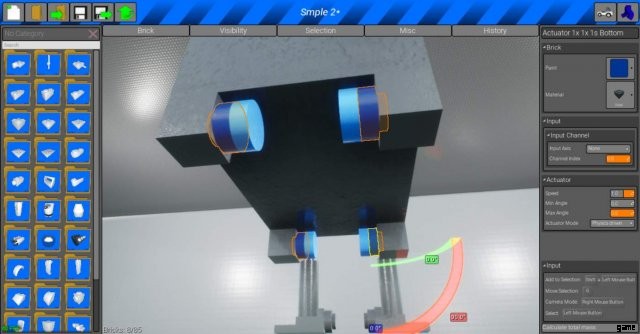
次に、Shift + move を使用して、3 つのレンガを所定の位置に移動します。接続すると、リダイレクタとアクチュエータの下部の両方が緑色に変わります。角度は約 30.9 度である必要があります。
ホイールの追加

スケーラブルなランプを追加します。
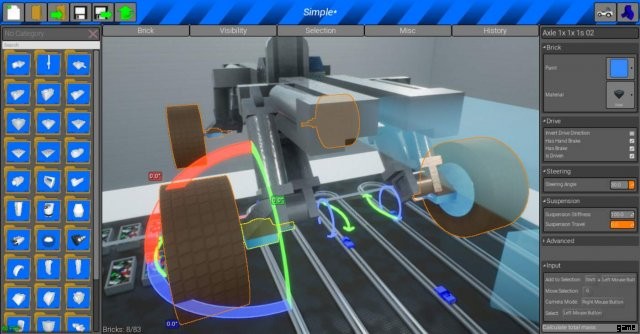
車軸と車輪を追加します。車軸を Suspension Stiffness:100 Suspension travel:0 に設定します
ノーマル ピストン サスペンション ガイド

やや一般的なサスペンション。
前後サスペンションは全く同じです。また、基本的に四隅すべて同じです。サスペンションをコピー アンド ペーストおよび/またはミラーリングするだけで、すばやく構築を完了できます。
追加情報:
すべてのピストンの設定:
- スプリング剛性:0.01
- アクチュエータ モード:春
他のすべてのアクチュエーターは次のように設定されています:
- アクチュエータ モード:物理駆動
車軸:
- サスペンション剛性:100
- サスペンション トラベル:0
- 回転半径:30
- ベースを作る
ベースを作る

5×8 のスケーラブルなブリック 1 から始めます。シートとエンジンを追加。次に、スケーラブル ブリックの角に 4 つの 1×1 スケーラブル キューブを追加します。

1×6 スケーラブル ブリック 1s を追加します。次に、1×1 のスケーラブルなキューブを追加します。次に、キューブの両側に 1×1 のスケーラブルなブリック 1 を 2 つ追加します。
サスペンションの作成
「Physics Driven」に設定された回転アクチュエータを追加します。次に、リダイレクター 4sx 1x4s を追加します。次に、Actuator Mode:Spring Spring Stiffness:0.01 に設定されたピストンを追加します

次に、リダイレクター 4sx 1x4s を追加します。次に、「Physics Driven」に設定された回転アクチュエータを追加します。次に、1×2 のスケーラブルなブリック 1 を追加します。
次に、「Physics Driven」に設定された回転アクチュエータを追加します。次に、スケーラブルな zylinder 1s を追加します。

これを脇に寄せてください。 1×5 のスケーラブルなブリック 1s またはスケーラブルな zylinder 1s から始めます。 1×5 スケーラブルの最後に、1×2 スケーラブル ブリック 1 またはスケーラブル Zylinder 1 を追加します。次に、1×2 スケーラブルの最後に Redirector 2x 1x 1s を追加します。

作成したものをスケーラブルな zylinder 1s と回転アクチュエータに接続します。 3 つのパーツの角度は 22.5/67.5 にする必要があります
ホイールの追加

車軸と車輪を追加します。車軸を Suspension Stiffness:100 Suspension travel:0 に設定します
完成!
これで完了です。シャーシを組み立てるか、好みに合わせて変更してみてください。