Stormworks:Build and Rescue – VTOL 航空機の作り方

ガイドは、ジェット エンジンを使用してストームワークスで VTOL 航空機を作成する方法を説明していますが、回転翼航空機にも変換されます。 VTOL 操作を行うには多くの方法がありますが、4 エンジン VTOL での経験から最も効果的であるとわかったテクニックを紹介することに焦点を当てます。
基本的な VTOL ガイド
操作の基本
VTOLとは「垂直離着陸」の略です。つまり、飛行機のような水平速度を使わずに、離陸して再び着陸するというのがコンセプトです。ヘリコプターは VTOL 航空機の好例です。操作する 4 つの基本的なコントロールがあります。ピッチ (前方に傾けて速度を上げる)、ロール (片側に傾けて横に移動する)、ヨー (機体を回転させて、どちらの方向を向いているかを制御する)、およびコレクティブ/アップ、ダウン (操縦する場合に制御する)高さを上げたり下げたりしています)。飛行機は非常によく似た方法で動作しますが、代わりにピッチを使用して高度を制御します。このガイドの後半で、航空機が飛行機のように水平飛行に移行する方法について説明します。
この例では、4 エンジンの Jet VTOL を使用します。クアッドコプターのドローンと非常によく似た働きをします。各コーナーに 1 つずつ、合計 4 つのエンジンで、ピッチ、ロール、高度を制御できます。
ヨーイングを制御するには、前後に傾けることができるエンジン排気も必要です。これにより、後で水平飛行に移行することもできます。

ヘリコプターはピッチを使用して前後に移動しますが、この例ではピッチを使用して航空機を安定させます。 2 つの後部エンジンの推力を増やし、2 つの前部エンジンの推力を減らすことで、機体を前方または反対に傾けることができます。


後方2基、前方2基の推力差を利用するように、左2基、右2基の推力差を利用して左右に転がります。片側の推力を減らすか、反対側の推力を増やすか、またはその両方です。

ヨーイングするには、エンジンの回転を使用する必要があります。エンジンの片側を前方に回転させ、反対側を後方に回転させることで、機体をその場で回転させることができます。
考慮すべきもう1つのことは、ヨーイングして推力を前後に送ると、機体を上に保つために下向きの推力が少なくなることです。ロジックでこれを補正する方法については後で説明します。

操作の最後の部分は、高度を制御することです。これは、すべてのエンジンの推力を単純に増減することによって行われます。ピッチ、ヨー、ロール、アップ/ダウン制御は、4 エンジン VTOL ですべてのエンジンによって同時に制御されます。また、ジャイロを使用して、これらすべてとコントロールを安定させます。ロジック部分に戻ると、それに戻ります。
VTOL の構築
ジェット VTOL を構築するには、明らかにジェット エンジンが必要です。ここでは 4 つのエンジンを使用していますが、同じコントロールを持つ同じグループにある限り、いつでもそれ以上のエンジンを使用できます。
この例のように、8 つの異なるユニットに合計 24 個のエンジンがありますが、それでも 4 つのグループになっています。

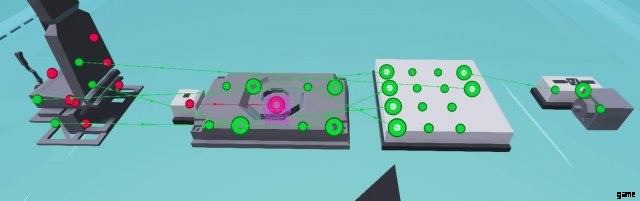
エンジンの配置の例を次に示します。

青い矢印は重心を示します。機体を棒でバランスをとる場合、これがバランスを取りたいポイントです。赤い矢印はリフトの中心を示します。これは、すべてのエンジン排気口の間の中心点です。航空機をひもで結びたい場合を想像してみてください。バランスのとれた弦からぶら下がるには、弦を重心で正確に結ぶ必要があります。これはエンジンも同じです。エンジンはあなたに揚力の中心を与え、これは架空の弦のように機能します. VTOL のバランスを完全にとるためには、質量の中心が揚力の中心と完全に一致するようにする必要があります。建造時に示された重心は、燃料の重量を考慮していないことに注意してください。そこで、あなたがやりたいことは、航空機が正確に揚力の中心でバランスを取るためのスティックを実際に作ることです.燃料と一緒にスポーンし、完全にバランスを取るために燃料を配置する必要がある場所を見つけます。

揚力の中心を見つけずに VTOL を作成することは完全に可能ですが、その場合、ジャイロを常に前方または後方にピッチングすることでジャイロに負担をかけるか、前後で異なるエンジン RPS を使用する必要があります。この方法では、完全に安定した VTOL を得ることはできません。揚力と質量の中心を見つけて、それらを一致させ、そのように維持するだけで、多くの手間が省けます。航空機に重量を追加してバランスを取り直すときはいつでも、実際の重心を確認する必要があることに注意してください。

目標は、水平飛行にも入ることができる VTOL を持つことです。そのため、VTOL エンジンに加えて水平対向エンジンを追加して、航空機を他の輸送モードよりも優れたものにする余分な速度を得ることができます。そうすれば、VTOL エンジンよりもはるかに高い RPS を与えることができ、VTOL エンジンで飛行する場合の最高速度を簡単に 2 倍にすることができます。
ロジックとコントロール
前にピッチ、ロール、ヨーについて話したとき、推力を変えることでこれらの操作を使用すると言いました。推力を制御するには、RPS を変更しません。代わりに、すべてのタイプのジェット排気にあるスラスト スポイラーを使用します。 You can send it a number between 0 and 1 to control the thrust no matter the RPS of the engines. 0 means full thrust because there’s no spoiling, when 1 means full spoiling so it cuts all thrust. Opposite to normal engines and throttle where 1 is full throttle. But there’s ways in the logic revert it. Getting back to that later.

Now we are getting to connecting everything. Making startups for the engines and PIDs for them I’ll let you figure out on your own, but what I will tell you is that you will have to tune the engines and find out how many RPS is needed for the engines. If you followed my tip with having the true center of mass balanced with the center of lift, then you can give the same RPS to all the VTOL engines.
I have made a very basic microcontroller that will help you get started.
- Start by connecting the different nodes from your gyro to the microcontroller.
- Place down a linear speed sensor and preferably convert it to knots (x*1.943844).
- Connect W/S on your pilot seat to the “Forward Throttle” on the microcontroller.
- Connect A/D to the Roll on the Gyro.
- Connect Left / Right to the Yaw on the Gyro.
- Connect Up / Down to the Up/Down on the Gyro.
- Also remember to give the gyro an ON signal to the Auto-Hover. There’s no point in not having it -activated.
Now we connect the microcontroller to the engines exhausts.
Make sure that the arrows on the rotating exhausts is pointing so that with a + signal they will point backwards. If having trouble with this use numerical inverters.
Next you just need to connect the rotation- and spoiler-number signals to the microcontroller.

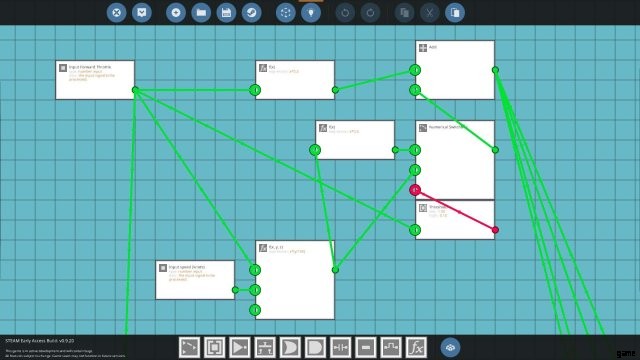
Let’s look at how the microcontroller looks like. Here we see the part of microcontroller that controls all the thrust spoilers. The Pitch, Roll and Up/Down input from the gyro comes into play here.
First, some values are inverted. Like when it pitches forwards it sends positive numbers to the rear engines, and negative numbers to the front. When it rolls to the right it sends positive numbers to the left engines, and negative numbers to right engines.
The Up / Down just goes clean into the equation with no inverting. All the values are simply added together “X+Y+Z”, where pitch=X, roll=Y and up/down=Z.
Then in the next box they get added more value from the rotation of the engine exhaust. Like I mentioned earlier, when the aircraft yaws, all engines tilt either forwards or backwards a little, meaning that less thrust is pointing downwards keeping the aircraft up. So in order to compensate, a small value of that rotation is added to the total thrust so the VTOL doesn’t loose any altitude when yawing.
Last we have function boxes with (x*-1)+1. This simply converts the signals from the gyro so that they work with the thrust spoilers which are inverted.

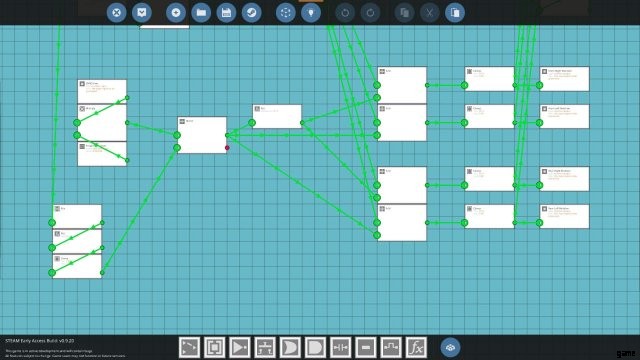
Next up, we have the input from the forward throttle and the speed. I won’t go into too much detail, but this small part basically tilts the engine exhaust backwards so you can fly horizontally.
The function in the bottom function box is x*(y/150).
You might want to change the number 150 lower or higher depending on the speed of your VTOL aircraft. This generally decides how fast the exhausts tilt back when you accelerate.
Last part of the microcontroller is the yaw and exhaust tilt. The Yaw can be very sensitive, so I added a property number that controls the sensitivity. The yaw is then divided by a value of the forward throttle so the aircraft doesn’t do any wild spins when you try to turn at low speeds. The rotation value from the forward throttle and the yaw is then added together and clamped where the final value is also sent back up to the thrust spoilers. To compensate for the loss of upwards lift when rotating. This part also makes sure that the spoilers are kept at full thrust when in horizontal flight.
Other Important Parts
So far you have hopefully have a VTOL that can take off and move around, but going into horizontal flight basically makes it into an airplane. And an airplane uses rudders and controls surfaces to maneuver. It will still need Roll control, Yaw rudder and Pitch rudders like a normal airplane.
I won’t go into detail on how to make those, but you can simply connect those control surfaces to the same gyro as the one controlling the VTOL flight.

You don’t have to use the “Jet exhaust rotating” part. You can also use entire jet engines on pivots and have several jet engines in one big engine unit. You can still use the same rotation controls from the microcontroller, but might need to recalibrate it a bit.

If the sensitivity on anything is too much or too little, the first place to start tuning it would be at the pilot seat. Don’t start changing too much in the microcontroller unless you know what you’re doing.
To gain even more speed horizontal flight you have two options.
You can make the RPS of the VTOL engines go up as you accelerate and back down to normal stable VTOL RPS when decelerating.
Or you can add additional booster engines pointing backwards like with a normal airplane. This is a much simpler version.
One final thing worth mentioning is the stability of the up/down controls from the gyro. The ingame gyros aren’t perfect in any way. When you have found an RPS value on the engines that will let you lift off, don’t go too much over it. If your RPS is too high it will start bobbing up and down. And if it is too low, then you won’t be able to lift off. So the RPS amount should be enough that you can lift off no problem, but not so much that the gyro starts making the whole aircraft jumping up and down. Using a custim gyro is always an option too.